This final lab chains the planning, perception, and control primitives from earlier labs into an end-to-end mission through 9 waypoints. The host Python runs A* with line-of-sight smoothing and the Lab 11 Bayes update; the Arduino executes one (heading, distance) segment at a time. They communicate over BLE via a new MODE_NAV_SEG FSM and a 4-field D|S|F|Y ack.
System Architecture
Offboard (host Python) owns the world map, the Bayes filter, and A*. Onboard (Arduino) owns the IMU/ToF and closes a control loop at ~200 Hz.
Segment Navigation
The atomic motion primitive is one turn-go segment: rotate to a world-frame heading, then drive forward for a commanded distance. Arguments arrive as SET_NAV_TARGET heading_deg|distance_m|seg_id, followed by START_RECORD. The Arduino tracks no world position — the host owns the world model.
Commands & State Machine
Four new BLE commands plus a MODE_NAV_SEG value for SET_MODE:
SET_NAV_TARGET heading|dist|seg_id— store the next segmentSET_NAV_CALIB pwm|speed_mps— setnav_go_pwm(70%) and the calibrated forward speedSET_NAV_DIST_MODE 0|1— 0 = time-based stop, 1 = KF-integrated stopRESET_YAW— zero the relative-yaw reference to switch between local and world frames
The FSM NAV_IDLE → NAV_TURN → NAV_STABILIZE → NAV_GO → NAV_TAIL → NAV_DONE consumes one segment per START_RECORD:
NAV_IDLE: motors off, waiting forSTART_RECORD.NAV_TURN: spin in place with Lab 6 PID, exits on|yaw err| < 3°.NAV_STABILIZE: hold heading 200 ms so IMU/ToF settle, then seed the KF.NAV_GO: open-loop 70% PWM with PID trimming L/R. Exits onprimary_stop(time/KF),safety_stop(ToF < 200 mm), orbackup_stop(3× expected time).NAV_TAIL: motors off, controller still ticking for 1 s so coast-down is logged.NAV_DONE: emit ackD: seg | S: reason | F: tof | Y: yawonce. The reason (dist/time/tof/backup) drives the rescue logic.
Feedback Control
Orientation Control
NAV_TURN reuses the Lab 6 orientation PID directly ($K_p = 2.5, K_i = 1.2, K_d = 0.25$), exiting on $|err| < 3°$. The same controller produced clean 20° steps in Lab 9 mapping, so drift over a single rotation is negligible.
case NAV_TURN:
{
// Spin in place to the target heading using orient PID
orient_pid.setpoint = nav_target_heading_deg;
float angular = orient_pid.compute(orient_sensor, dt, true);
applyAngularOutput(-angular);
if (fabs(orient_pid.error_value) < NAV_TURN_TOL_DEG)
{
nav_state = NAV_STABILIZE;
nav_phase_start_us = current_control_time;
}
break;
}For NAV_GO I overlay the orientation PID onto the open-loop forward command so the robot holds heading while driving straight. Mixed L/R outputs are clipped jointly so the heading correction always wins over the forward bias.
case NAV_GO:
{
// Open-loop forward at the calibrated PWM, with orientation PID mixed into left/right to keep the heading constant
float angular = orient_pid.compute(orient_sensor, dt, true);
float left_raw = nav_go_pwm - angular;
float right_raw = nav_go_pwm + angular;
float max_raw = max(fabs(left_raw), fabs(right_raw));
if (max_raw > 100.0f)
{
float scale = 100.0f / max_raw;
left_raw *= scale;
right_raw *= scale;
}
left_motor_pct = constrain(left_raw * MOTOR_SCALE, -100.0f, 100.0f);
right_motor_pct = constrain(right_raw * MOTOR_SCALE, -100.0f, 100.0f);
setMotors(left_motor_pct, right_motor_pct);
....
}Distance Contorl
The key design choice for NAV_GO is when to stop. I implemented two modes and compared them.
TOF-value with KL-filter
The Lab 7/8 KF is seeded with the front ToF on entry to NAV_GO, runs kfPredict every tick on the motor command, and kfUpdate only on fresh ToF. Traveled distance is |kf_pos_start − kf_pos_now|; stop when ≥ target.
case NAV_STABILIZE:
{
orient_pid.setpoint = nav_target_heading_deg;
float angular = orient_pid.compute(orient_sensor, dt, true);
applyAngularOutput(-angular);
if (current_control_time - nav_phase_start_us > NAV_STABILIZE_US)
{
setMotors(0.0f, 0.0f);
// Seed the Kalman filter with the current ToF reading
float kf_init = (tof2_dist > 10.0f && tof2_dist < 6000.0f)
? tof2_dist
: NAV_KF_INIT_FALLBACK_MM;
dist_pid.sensor_mode = PIDController::KALMAN;
dist_pid.resetKalman(kf_init);
nav_kf_pos_start_mm = dist_pid.kfPosition();
nav_dist_traveled_m = 0.0f;
nav_state = NAV_GO;
nav_phase_start_us = current_control_time;
}
break;
}case NAV_GO:
{
// Open-loop forward at the calibrated PWM, with orientation PID
//...
// KF-Filter Control
dist_pid.output_value = nav_go_pwm;
dist_pid.kfPredict(dt);
if (tof2_updated && tof2_dist > 10.0f && tof2_dist < 6000.0f)
{
dist_pid.kfUpdate(tof2_dist);
}
dist_pid.sensor_value = dist_pid.kfPosition();
nav_dist_traveled_m =
fabs(nav_kf_pos_start_mm - dist_pid.kfPosition()) / 1000.0f;
bool dist_done = nav_dist_traveled_m >= nav_target_dist_m;
}Time Elasped Control
The alternative is to stop after distance / nav_calib_speed_mps seconds. A tape-measured 3 m run at 70% PWM averaged 1.7 m/s across three trials (σ < 0.05 m/s), giving elapsed_s ≈ 1.76 for a 2 m segment.
case NAV_GO:
{
float elapsed_s = (current_control_time - nav_phase_start_us) / 1.0e6f;
float expected_s = (nav_calib_speed_mps > 1e-3f)
? nav_target_dist_m / nav_calib_speed_mps
: 0.0f;
bool time_done = elapsed_s >= NAV_TIME_SAFETY_MULT * expected_s;
}Analysis
Test: start 3 m from a wall, command heading 0° and distance 2 m — the car should stop ~1 m from the wall.
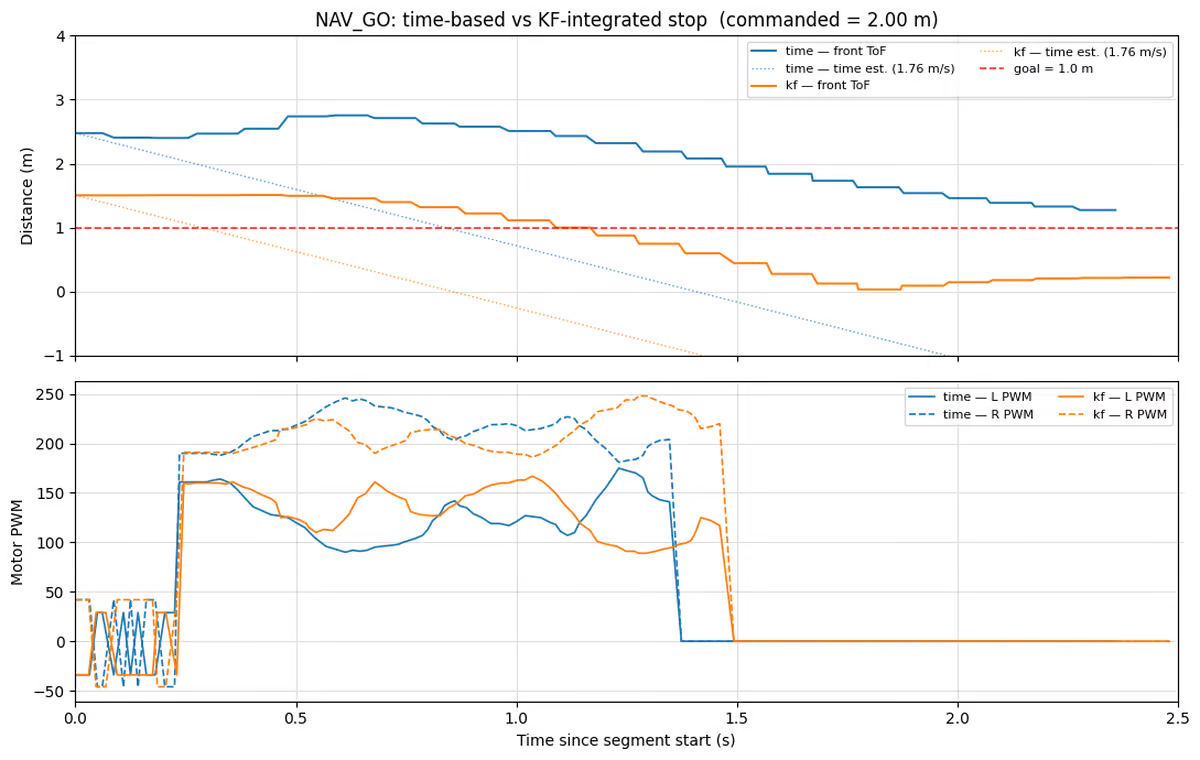
Time mode landed within ~10 cm of the 1 m mark. KF mode overshot most trials: kfPredict misses the speed ramp-up, so integrated distance lags true travel and the stop fires late. KF also drifts when the front ToF goes invalid. So time-based is primary, with KF as a 3× expected-time backup against a stuck integrator.
Path Execution
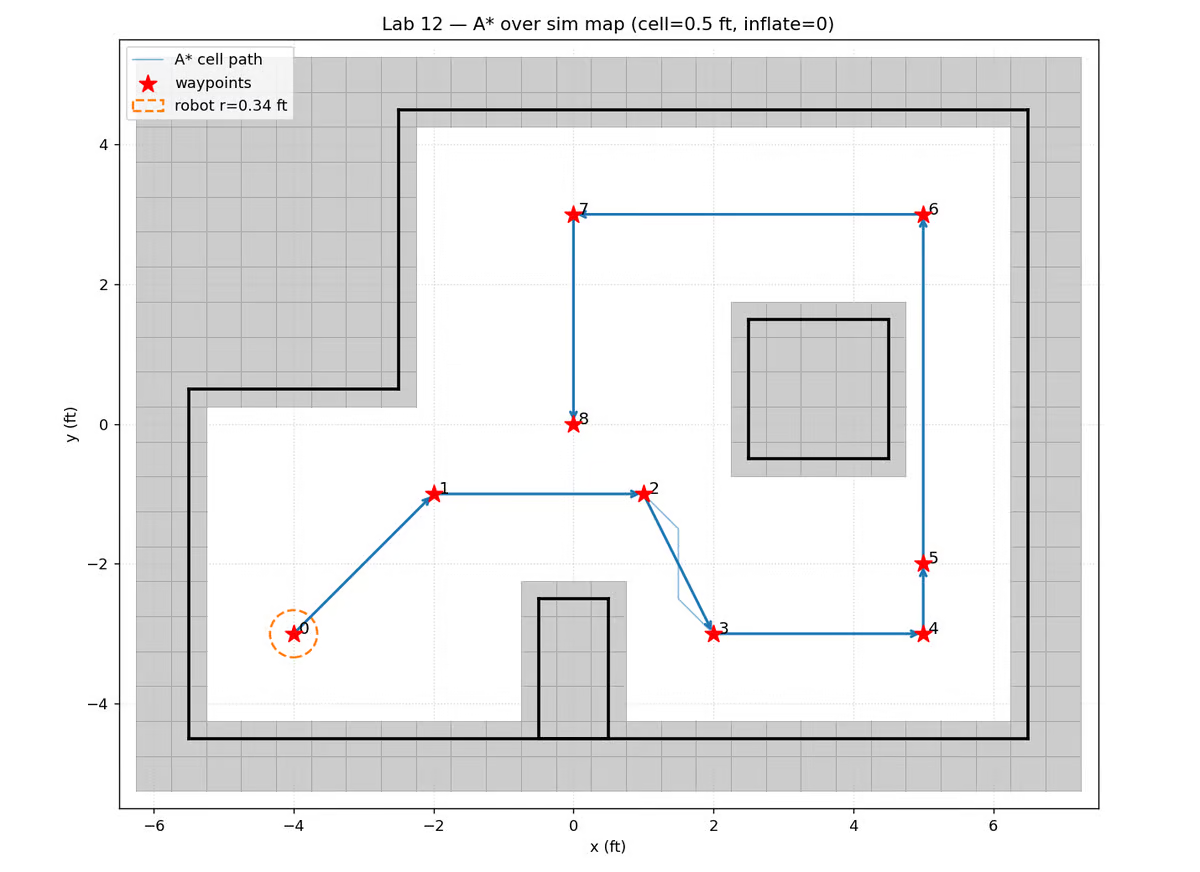
Goal: hit these 9 waypoints (feet), from (-4, -3) to (0, 0):
- (-4, -3) <--start
- (-2, -1)
- (1, -1)
- (2, -3)
- (5, -3)
- (5, -2)
- (5, 3)
- (0, 3)
- (0, 0) <--end
Each segment uses only the $(\delta_{rot1}, \delta_{trans})$ pair of the Lab 10 odometry model — heading_deg for $\delta_{rot1}$ (absolute world heading), distance for $\delta_{trans}$. $\delta_{rot2}$ is dropped because the next segment's NAV_TURN absorbs it.
For each pair of waypoints the host calls A*, smooths the result, and walks the segment list — each becomes a SET_NAV_TARGET + START_RECORD + await NAV_DONE BLE round trip.
async def send_segment(seg_id, heading_deg, dist_m, timeout_s=20.0, poll_s=0.05):
last_ack.pop(seg_id, None)
ble.send_command(CMD.SET_NAV_TARGET, f"{heading_deg}|{dist_m}|{seg_id}")
await asyncio.sleep(0.10)
ble.send_command(CMD.START_RECORD, "")
t0 = time.time()
while seg_id not in last_ack:
if time.time() - t0 > timeout_s:
return None
await asyncio.sleep(poll_s)
return last_ack[seg_id]A-star Wayplanning
The occupancy grid is built by point-in-polygon on cell centers, then inflated by the chassis bounding-circle radius $\sqrt{0.18^2 + 0.10^2}/2 \approx 0.10$ m so the robot stays clear of every wall during in-place rotation.
Algorithm
A* expands nodes by $f(n) = g(n) + h(n)$ — $g(n)$ is actual cost from start, $h(n)$ an admissible heuristic. I use edge cost $1$ for cardinals and $\sqrt 2$ for diagonals with Euclidean $h(n) = \sqrt{(n_x - g_x)^2 + (n_y - g_y)^2}$ (≤ any grid path, so admissible). Diagonals are blocked when either orthogonal neighbour is occupied, and start/goal are forced passable so endpoints inside the inflation buffer still plan.
def astar(grid, start, goal):
grid = grid.copy(); grid[start] = 0; grid[goal] = 0
g, parent, closed = {start: 0.0}, {}, set()
h = lambda c: math.hypot(c[0] - goal[0], c[1] - goal[1])
pq = [(h(start), start)]
while pq:
_, cur = heapq.heappop(pq)
if cur in closed: continue
if cur == goal:
path = [cur]
while cur in parent:
cur = parent[cur]; path.append(cur)
return list(reversed(path))
closed.add(cur)
for dx, dy, step in _NEIGHBORS: # 4 cardinals + 4 diagonals
n = (cur[0] + dx, cur[1] + dy)
if not in_bounds(n) or grid[n]: continue
if dx and dy and (grid[cur[0]+dx, cur[1]] or grid[cur[0], cur[1]+dy]):
continue # block corner-clipping diagonals
ng = g[cur] + step
if ng < g.get(n, math.inf):
g[n], parent[n] = ng, cur
heapq.heappush(pq, (ng + h(n), n))
return []plan_segments wraps this with cell/world conversion and the smoothing pass described under Trial 2:
def plan_segments(start_ft, goal_ft):
sa = world_to_cell(start_ft, origin, CELL_SIZE)
sb = world_to_cell(goal_ft, origin, CELL_SIZE)
cells = astar(grid, sa, sb)
if not cells:
raise RuntimeError(f"No path {start_ft} -> {goal_ft}")
smoothed = smooth_path(cells, grid)
return cells_to_segments(smoothed, origin, CELL_SIZE,
simplify_first=False)I planned the same 9 waypoints over two maps: the "sim" map from world.yaml and the "lab9" map I derived from the merged Lab 9 scatter plot.
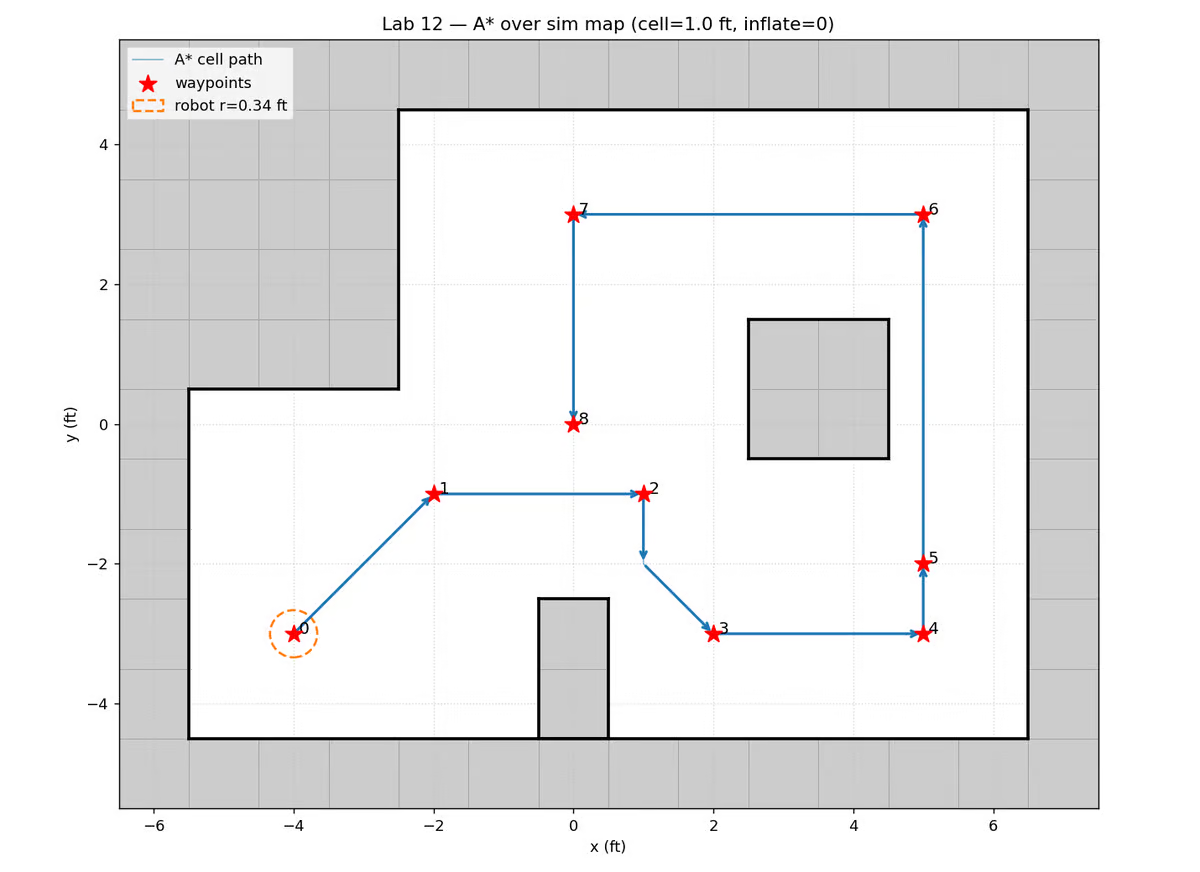
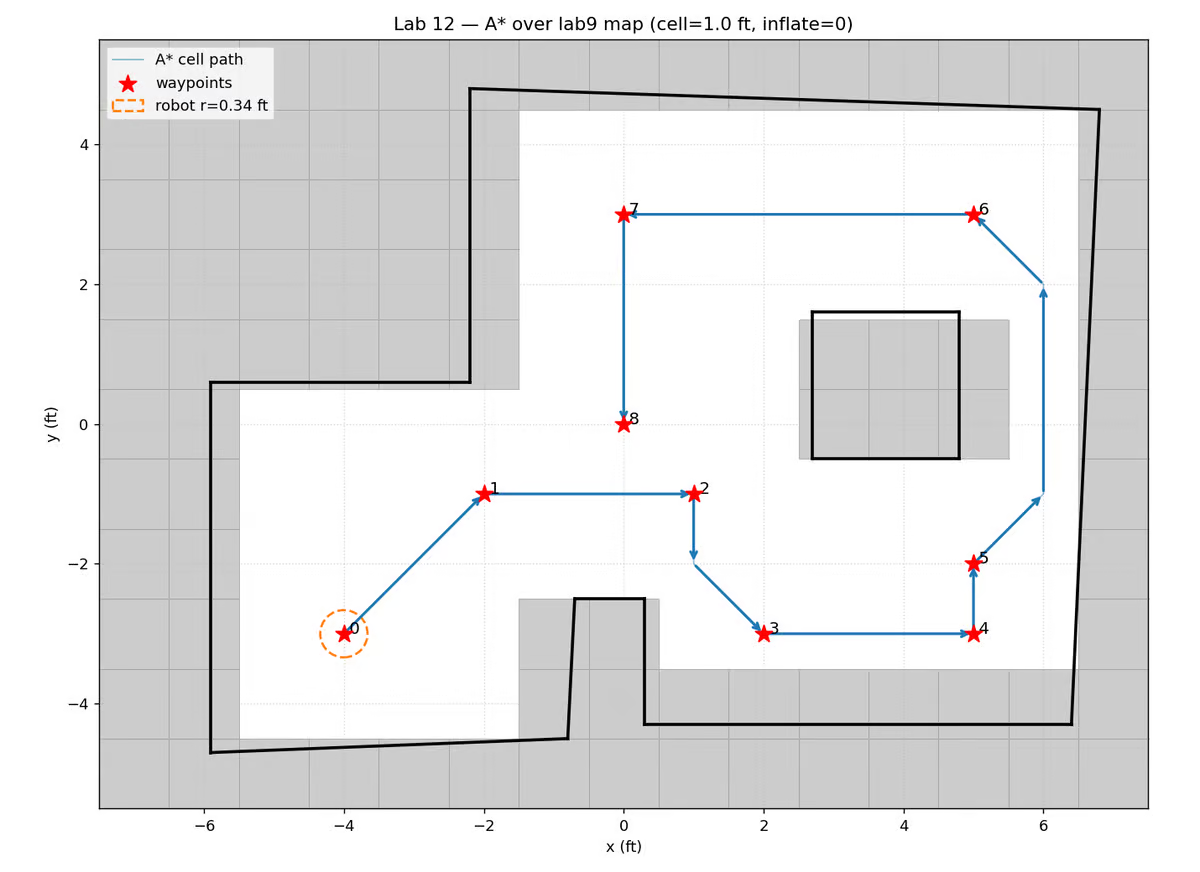
The lab9 plan is more zig-zagged because its walls are tilted a few degrees off the integer-foot axes, so the inflated grid eats more cells along diagonals and smooth_path finds fewer long shortcuts. The sim plan, with axis-aligned walls, collapses most hops to 1–2 segments.
Trial with Cell Size = 1
With 1 ft cells, every waypoint sits on a cell center but obstacles can only be avoided in 1 ft steps. A* takes the long way around waypoint 4 → 5.
Trial with Cell Size = 2
Halving cell size to 0.5 ft doubles grid resolution and shrinks the inflation buffer from 1 ft to 0.5 ft. Raw 8-connected A* only emits 45°-multiple headings, so I run smooth_path on top — a greedy string-puller that replaces zig-zag runs with the longest straight segments still clear via line_of_sight. After smoothing, headings become arbitrary (e.g. $\mathrm{atan2}(1, -2) \approx 153.4°$) and one move can replace 2–3 raw 45° hops. With the finer grid, smooth_path steps in (2, 1) or (3, 1) cell ratios, and the zig-zag at hop 6 → 7 collapses into a single diagonal.
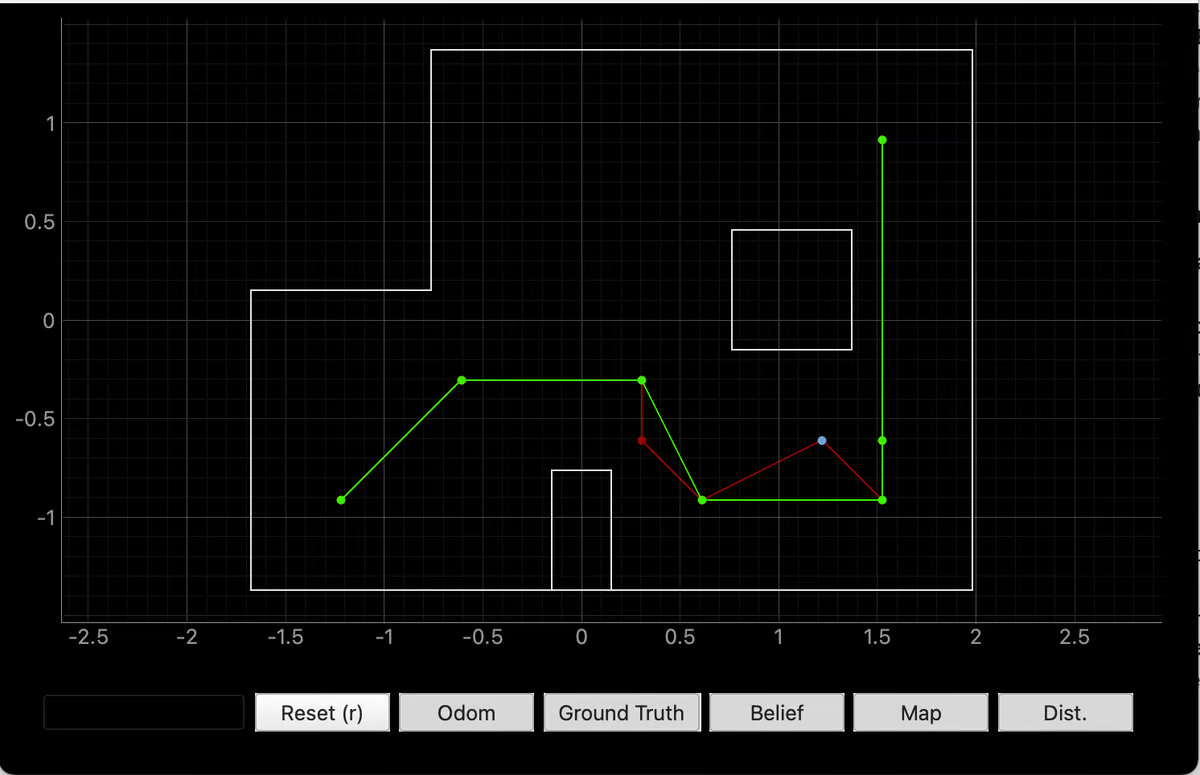
Localization
In both pre-mapping trials the time-based control accumulated 1–2 ft of drift by waypoint 7 — battery sag drops the calibrated 1.7 m/s to ~1.4 m/s on a tired pack, and friction asymmetry adds yaw drift. Re-localising every hop would fix this, but at ~25 s per scan it is too slow. So I added a periodic Bayes update from Lab 11.
After every LOCALIZE_EVERY hops, localize_once runs four phases:
- Pre-scan turn. A zero-distance
NAV_SEGwith heading 0° rotates the robot to face world +y. - Reset yaw.
RESET_YAWzeros the IMU so the scan starts at IMU 0 ↔ world 0. - Scan + Bayes update. The mapping FSM (
SET_MODE = 5,SET_MAP_DEGREES = 380) spins and streams 18 ToF readings; the host applies the 69.85 mm offset and runsloc.update_step()with a uniform prior. - Post-scan reset. The scan ends at IMU +380° = world −20° (under
INVERT_HEADING = True); a secondRESET_YAWplusyaw_world_offset = -20°keepsworld_to_txcorrect.
The 380° (not 360°) sweep absorbs the PID tolerance on the last step; the −20° offset is its systematic consequence.
is_loc_hop = (hop % LOCALIZE_EVERY == 0) or (hop == n_hops)
if is_loc_hop and not rescued_this_hop:
x_ft, y_ft, _theta, new_offset = await localize_once(
yaw_world_offset, seg_id_base=hop * 100 + 90)
believed_ft = (x_ft, y_ft)
yaw_world_offset = new_offset
current_world_heading = new_offsetTrial 1
Mapping after every two segment navigations.
Trial2
Mapping after every three segment navigations.
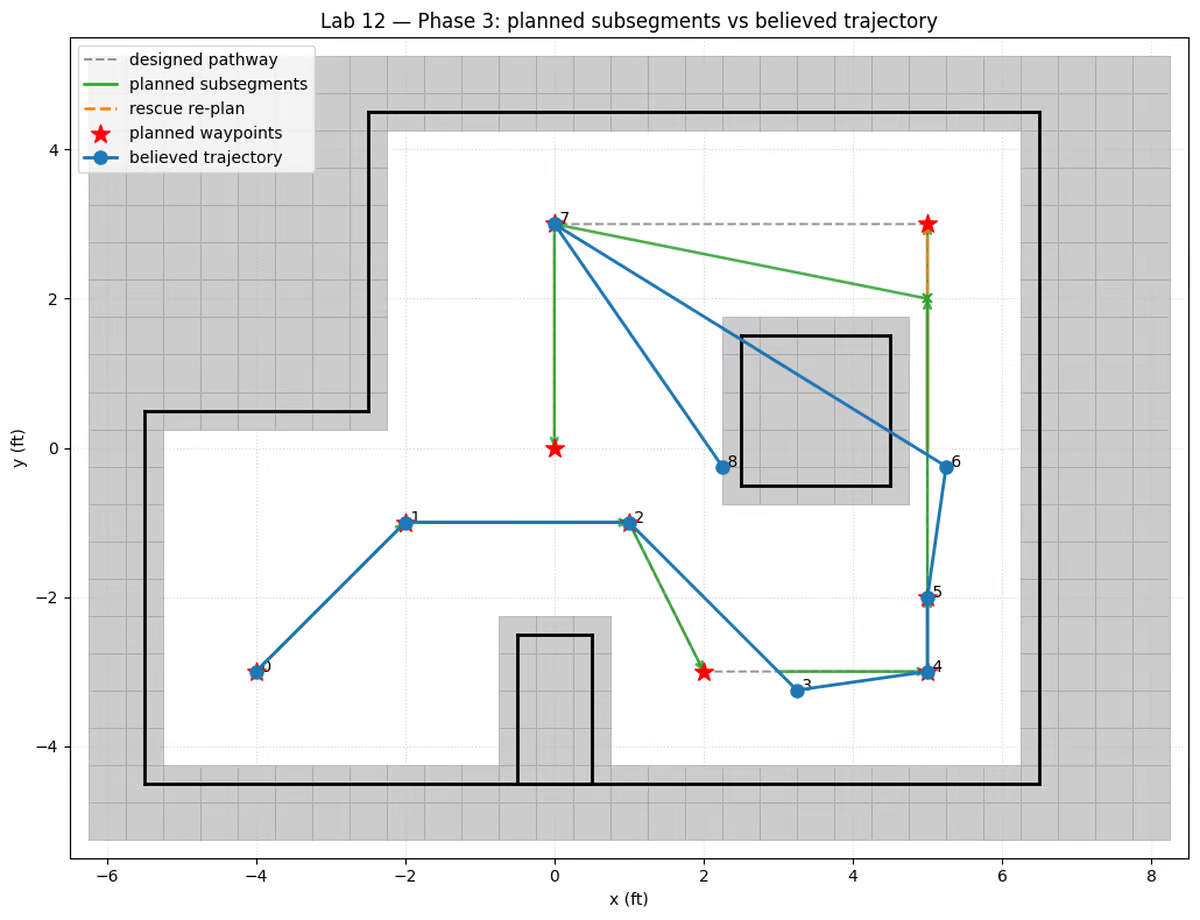
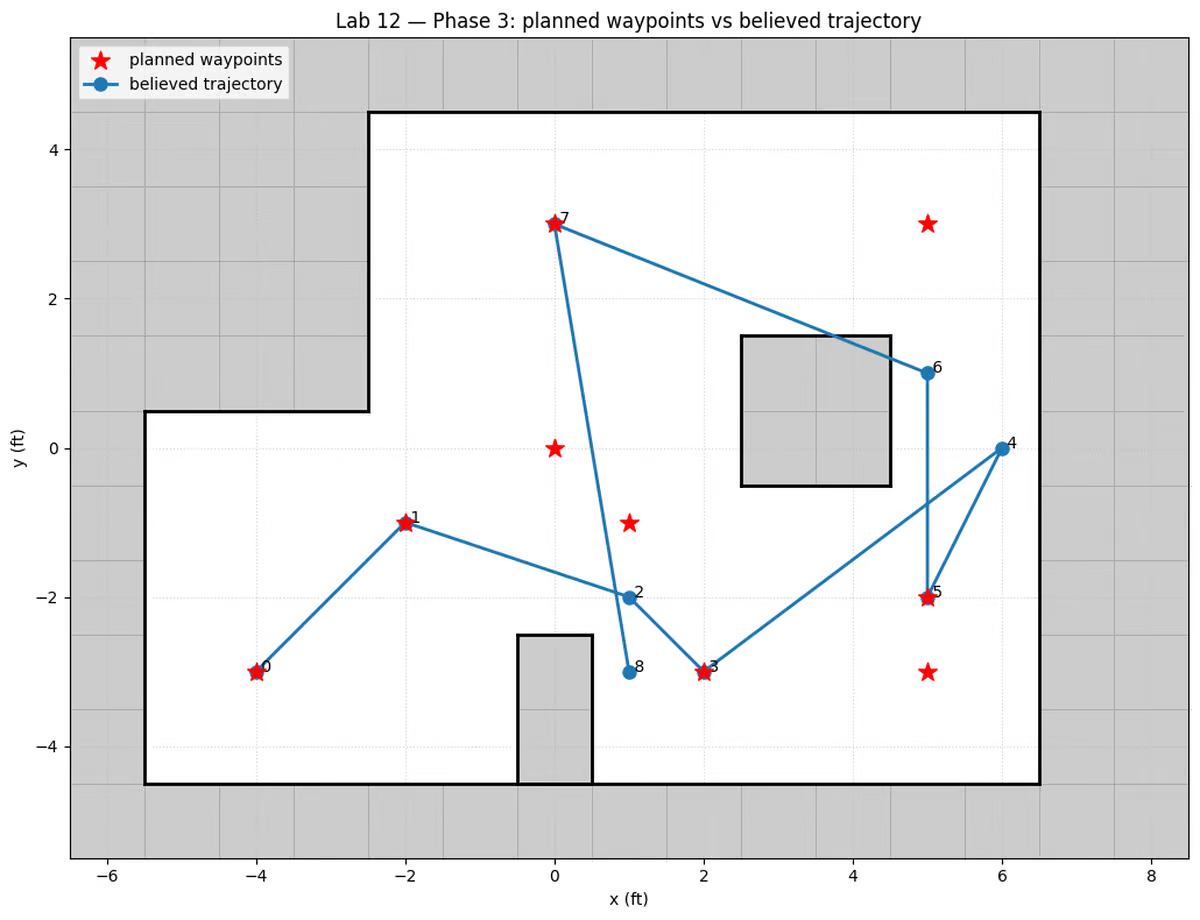
Discussion
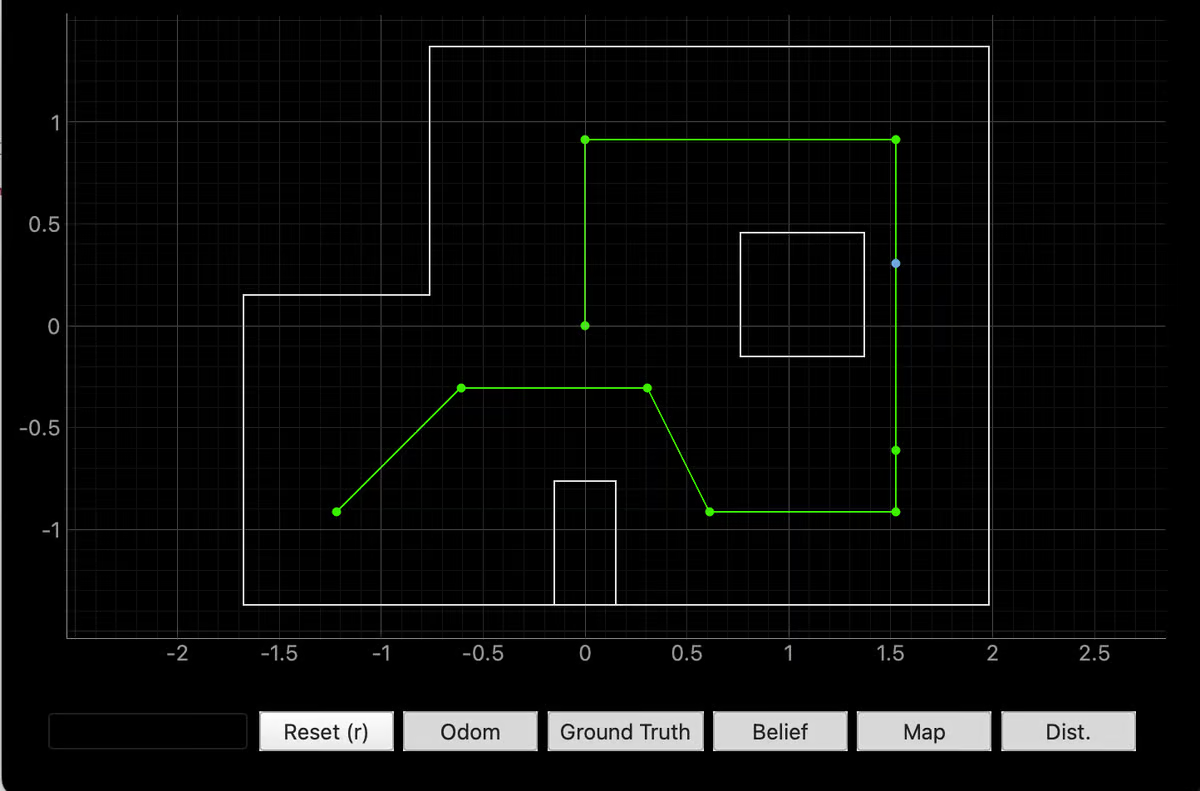
In the plotter, blue points are the believed trajectory (one per hop), grey dashes the designed pathway, green arrows the initial A* segments, and orange dashes the rescue re-plans. Both trials show the same recovery pattern: an overshoot drops the belief beyond the goal and A* turns the robot back; an undershoot produces a shorter remaining path that still hits the waypoint.
Still, localization performs worse than the no-localization baseline. Three reasons:
- Belief drift. Waypoints 5–7 are feature-poor and snap to a neighbour cell, injecting ≥ 0.3 m systematic error into the next plan instead of removing it.
- Scan yaw drift. After two scans the world-to-IMU offset is off by ~5°, biasing every subsequent heading. Trial 1's believed trajectory rotates clockwise after waypoint 5 because of this.
- Battery cost. Each scan drains the pack faster than straight driving, so 1.7 m/s degrades faster between hops.
Trial 2 (every 3 hops) is slightly better on the right side with one fewer scan but loses the late correction at 7 → 8 that Trial 1 gets.
Conclusion
The pipeline runs end-to-end and hits every waypoint at least once: ~30 s without localization, ~110 s with localization every other hop. But it's fragile — drift in any one component (battery sag, ToF dropout, scan yaw, neighbour-cell localisation) bleeds into the next plan, and the Bayes update was not enough to compensate for open-loop drift on the right half of the map.
Hardest problem: the world ↔ local frame conversion when adding mid-mission localization. I originally let the robot scan from whatever heading it landed at, but the angle transform broke. Forcing a turn-to-+y before every scan (mirroring Lab 11's calibration) fixed it.
Future work: a Bug 0/2 wall-following fallback. The FSM already exposes four stop reasons (dist/time/tof/backup), so the host can detect a ToF stop and switch to wall-follow before re-planning. The terminating logic is already in NAV_GO:
bool safety_stop = (tof2_dist > 0.0f) && (tof2_dist < nav_safety_tof_mm);
bool primary_stop = nav_use_kf_dist ? dist_done : time_done;
const char *primary_reason = nav_use_kf_dist ? "dist" : "time";
bool backup_stop = (elapsed_s >= 3.0f * expected_s);
if (primary_stop || backup_stop || safety_stop)
{
setMotors(0.0f, 0.0f);
left_motor_pct = 0.0f;
right_motor_pct = 0.0f;
if (safety_stop)
nav_stop_reason = "tof";
else if (primary_stop)
nav_stop_reason = primary_reason;
else
nav_stop_reason = "backup";
nav_ack_pending = true;
nav_state = NAV_TAIL;
nav_phase_start_us = current_control_time;
}
break;